NoMaD: Goal Masked Diffusion Policies for Navigation and Exploration
High Level Block Diagram
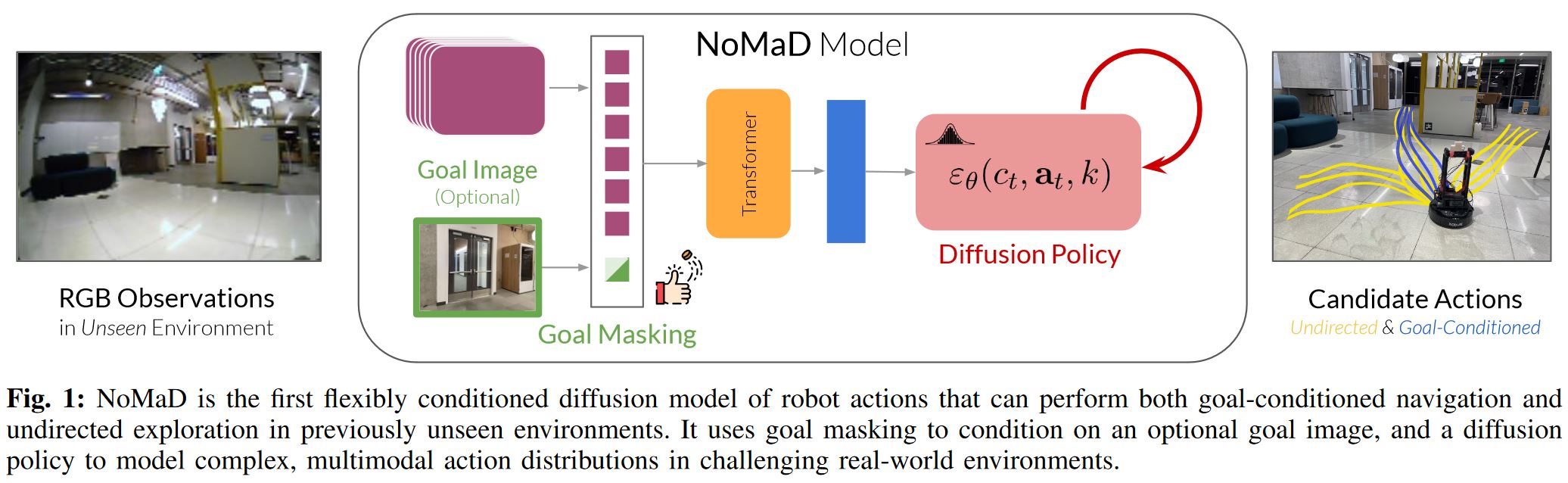
Summary
Goal
One diffusion policy for goal-directed and goal-agnostic exploration.
Motivation
Previous approaches use different models for task agnostic vs task specific navigation.
Closest work
ViNT: A Foundation Model for Visual Navigation
ViNT uses 300M parameter Image diffusion model to generate Image sub goals.
NoMaD directly generates actions conditioned on robot's observation using diffusion.
NoMaD requires 15x fewer parameters.