GNM: A General Navigation Model to Drive Any Robot
Motivation
Till now we have only focused on one Robot.
How do we generalize this to different types of robots.
Fundamental models for Navigation
Challenges
Large variations in action space , robot configuration, Kinematic and Dynamic capabilities
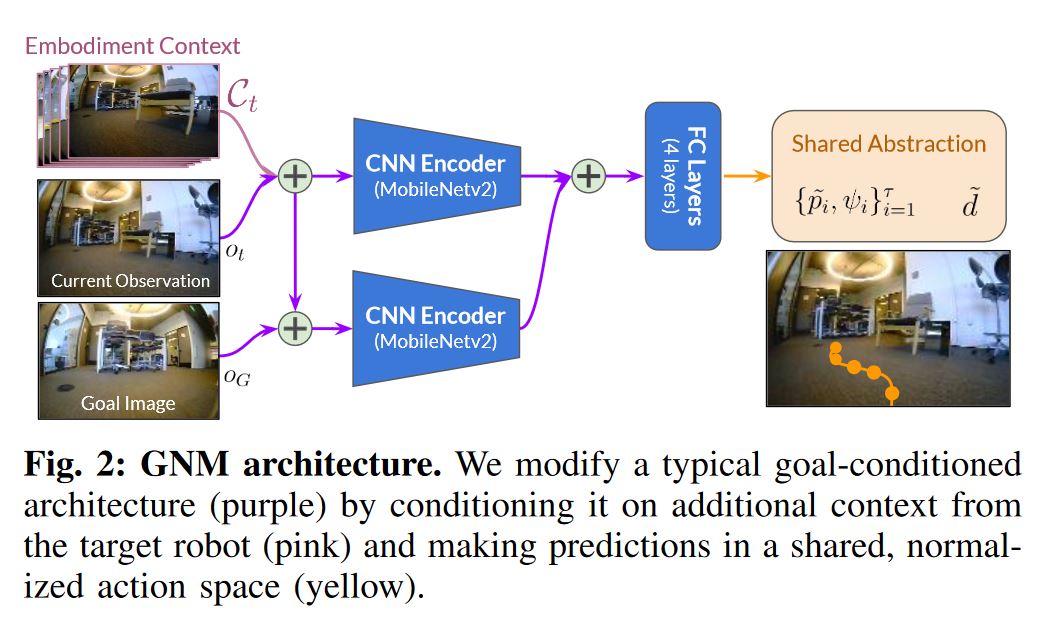
Solution
Use past 5 observations for Embodiment context for different robots.
Normalized Actions
Policy
Using ViNG approach for Navigation
~/org-roam/gdrive/Notability/Rl/LLM and RL/ViNG.pdf